在bilateral filter 到 HDRnet这篇文章里, 我们提到了双边滤波可以较好的保持图像的边缘,但是它也有着自己的问题:
- 如果一个像素周围的相似像素较少,会出现梯度反转现象
- 暴力的双边滤波需要$O(Nr^2)$的时间
而导向滤波(guided filter),则可以在保持梯度的同时也有着极大的速度优势,计算时间是线性的O(N)
导向滤波(Guided Filtering)和双边滤波(BF)、最小二乘滤波(WLS)是三大边缘保持(Edge-perserving)滤波器。 当然,引导滤波的功能不仅仅是边缘保持,只有当引导图是原图的时候,它就成了一个边缘保持滤波器。
原理
导向滤波的原理图如下所示:
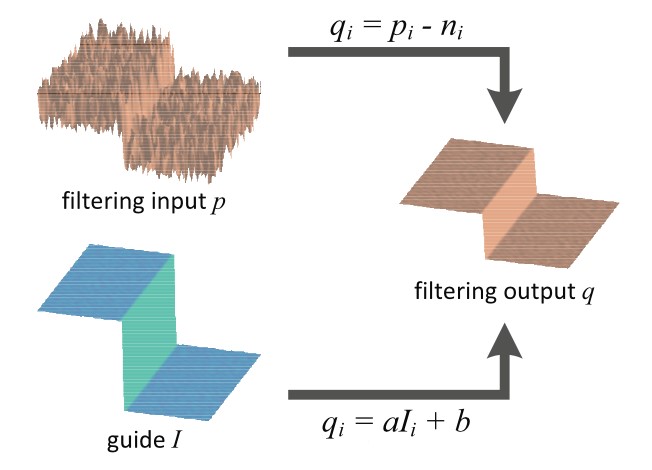
对于输入图像p,通过引导图像I,经过滤波后得到输入图像q,导向滤波是这样计算的:
\[q_i = a_kI_i + b_k, \forall i \in w_k \\ q_i = p_i - n_i\]导向滤波的一个重要假设是输出图像q和引导图像I在滤波窗口$w_k$上存在局部线性关系。 这样的话,在一个局部区域里,如果引导图像I有一个边缘,输出图像q也保持边缘不变, 因为对于相邻的像素点而言,存在$\bigtriangledown q=\alpha \bigtriangledown I$。 因此,只要求到了系数a,b,也就得到了输出。
同时,我们认为,输入图像p是由输出图像q加上我们不希望的噪声或纹理n得到,因此有p=q+n。
接下来,就是解出这样的系数,使得p、q的差别尽可能小。对于每一个滤波窗口,该算法在最小二乘意义 上的最优化,可以表示为:
\[argmin \sum_{i \in w_k}(q_i - p_i)^2 \\ argmin \sum_{i \in w_k}(a_kI_i + b_k - p_i)^2\]最后,引入一个正则化参数$\epsilon$,防止$a_k$过大,于是有:
\[E(a_k,b_k) = \sum_{i \in w_k}((a_kI_i + b_k - p_i)^2 + \epsilon a_k^2)\]对上述方程进行求解,有:
\[\frac{\delta E}{a_k} = \sum_{i \in w_k} (2(a_kI_i + b_k - p_i)I_i + 2 \epsilon a_k) = 0 \\ \frac{\delta E}{b_k} = \sum_{i \in w_k}(2(a_kI_i + b_k - p_i)) = 0 \\ a_k = \frac{\sum_{i \in w_k}p_iI_i - b_k \sum_{i \in w_k}I_i}{\sum_{i \in w_k}(I_i^2 + \epsilon)} \\ b_k = \frac{1}{|w|}(\sum_{i \in w_k}p_i - a_k \sum_{i \in w_k}I_i)\]将$b_k$带入$a_k$,整理可得:
\[a_k=\frac{\frac{1}{|w|}\sum_{i \in w_k}I_ip_i - \mu_k \overline{p}_k}{\sigma_k^2 + \epsilon} \\ b_k = \overline{p}_k - a_k \mu_k\]在这里,$\mu_k$和$\sigma_k^2$分别表示引导图像I在窗口$w_k$中的平均值和方差, |w|表示窗口$w_k$内像素点的个数, \(\overline{p}_k = \frac{1}{|w|}\sum_{i \in w_k}p_i\) 表示输入图像在窗口中的平均值。
接下来,将上述线性模型应用到整个图像的滤波窗口即可。但是,每个像素点会被包含到多个窗口里: 如果用3*3的窗口滤波,除了边缘位置,每个点都会抱包含在9个窗口里;每个窗口都会有一个$q_i$值, 对所有的值进行平均,得到最终结果:
\[q_i=\frac{1}{|w|}\sum_{k:i \in w_k}(a_kI_i + b_k) =\overline{a}_iI_i + \overline{b}_i\]这样,就建立里每个像素点从I到q的映射。
边缘保持
对于该算法,输入和引导图像是同一副图像也就是I=p的时候,该算法成为一个边缘保持滤波器,方程的接表示为:
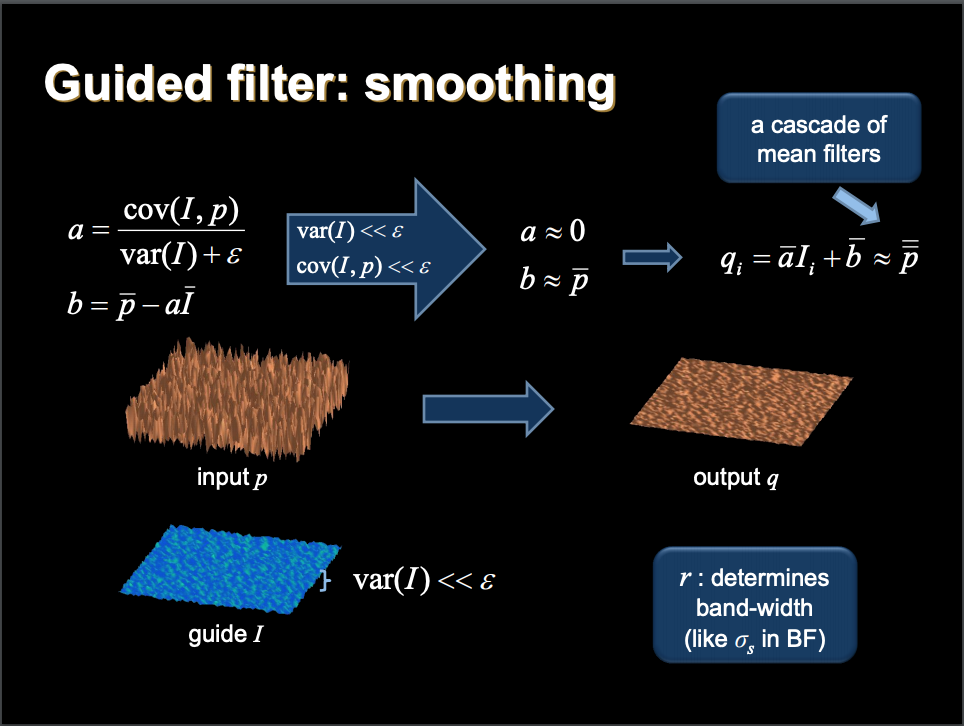
\[a_k = \frac{\sigma_k^2}{\sigma_k^2 + \epsilon} \\ b_k = (1 - a_k)\overline{p}_k\]在这种情况下,$\epsilon$相当于界定平滑区域和便与其按区域的阈值。考虑如下两种情况:
- Case 1:平坦区域。如果在某个滤波窗口内,该区域是相对平滑的,方差$\sigma_k^2$将远远小于$\epsilon$。 从而$a_k \approx 0,b_k \approx \overline{p}_k$。相当于对该区域作均值滤波。
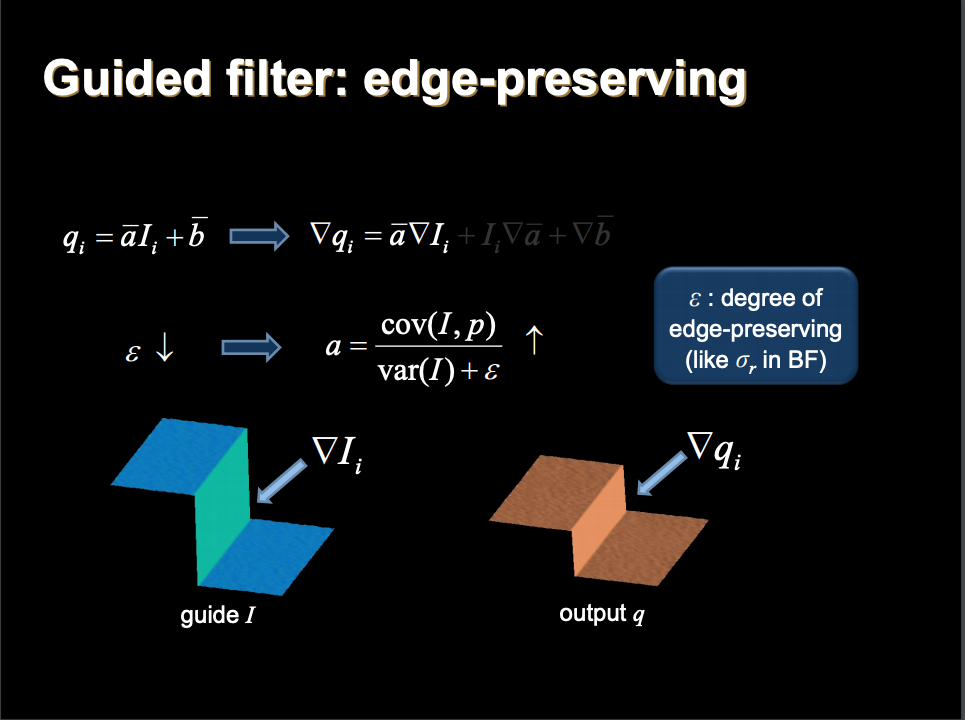
- Case 2:高方差区域。相反,如果该区域是边缘区域,方差很大, 方差$\sigma_k^2$将远远大于$\epsilon$。 从而$a_k \approx 1,b_k \approx 0$。相当于在区域保持原有梯度。
其他应用
羽化、去雾等,请见ppt
代码
链接。
参考
- https://blog.csdn.net/weixin_43194305/article/details/88959183
- https://zhuanlan.zhihu.com/p/161666126
- http://kaiminghe.com/eccv10/
- http://kaiminghe.com/eccv10/eccv10ppt.pdf
- http://kaiminghe.com/publications/eccv10guidedfilter.pdf
- https://zhuanlan.zhihu.com/p/36813673